Найти
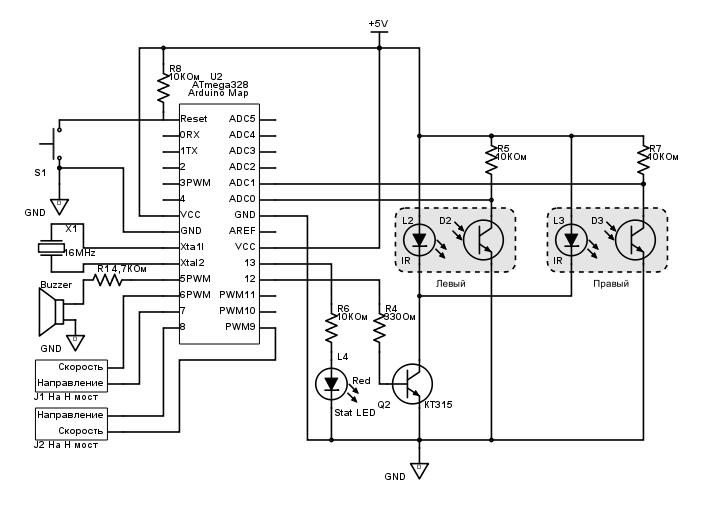
Abstract - Milan Zaitsev - Management by the optical flow applied to the robot K Структурная схема робота пылесоса
< Предыдущая
Фото - 17
Следующая >
Все фото на тему:
Структурная схема робота пылесоса